
在上一篇文章《谈谈线控转向系统(上)-英菲尼迪Q50的线控转向系统》中,我们BenchMarking了全球第一个也是到目前为止唯一的一个量产线控转向系统。今天,我天马行空的来瞎掰一下关于线控转向系统概念设计的一些个人想法。
功能安全目标这个题目其实有点大,下面假设读者对EPS的功能安全有了一定的了解,只是浅尝辄止的谈一谈SBW跟EPS相比,有哪些新的变化。导入线控转向以后(暂且只考虑L2这个阶段的SBW,L3以上无论是SBW还是EPS,其功能安全目标都与L2有重大的区别),有如下两个新的Hazard必须考虑:
其产生的原因可能多种多样,如转向管柱角度传感器故障、齿条位置传感器故障、转向电机故障、转向控制故障等
相应的安全手段:在对应的故障发生的情况下,如果转向器侧的执行机构能够正常工作控制电机输出力矩,那么安全措施为将离合器吸和,由转向器侧的执行机构执行EPS备份功能,整套系统转等效于一套PEPS或REPS;
如果转向器侧的执行机构不能控制电机输出力矩,其安全措施为将吸合离吸和,由转向管柱侧执行EPS备份功能,整个系统等效于一套C-EPS。
其原因可能是用来进行整车行驶状态估计的信号丢失或不正确,转向管柱侧电机及本身的故障等等
其安全手段为,将离合器吸和,由转向器侧的执行机构执行EPS备份功能,整套系统转变成一套PEPS或REPS。
既然是Conception Design,暂且先不考虑控制策略在嵌入式的实现,用一个快速控制原型(RCP)来实现其功能。框图如下:
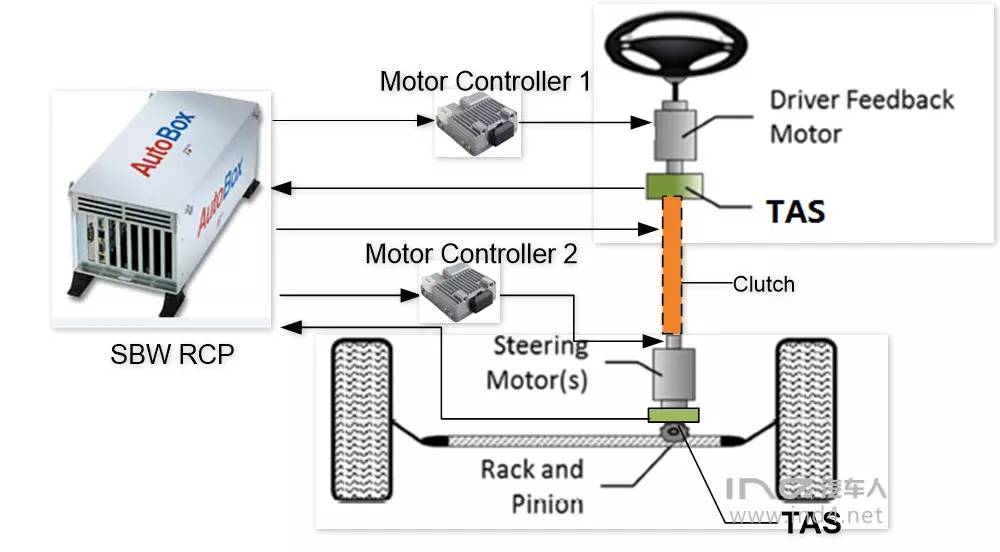
电机及GearBox总成两组:转向器侧电机需求基本同EPS,转向管柱侧电机如果不实现其EPS备份功能的话,因为只要提供一个给驾驶员手力0-5Nm的力矩反馈,而驾驶员转动方向盘的极限速度也就1000/s(约170rpm),因此可以选择比EPS功率更小的电机和更小的GearBox减速比。
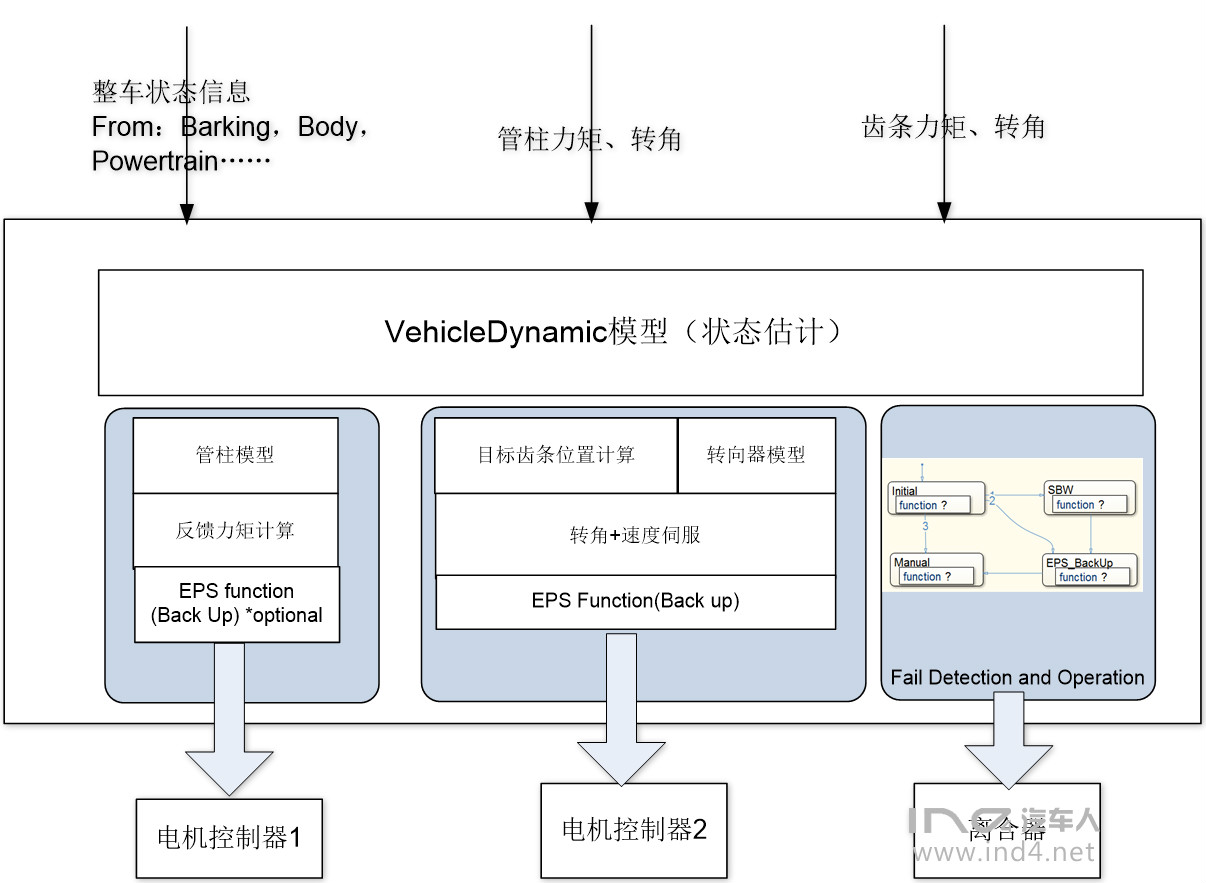
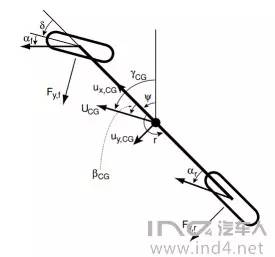
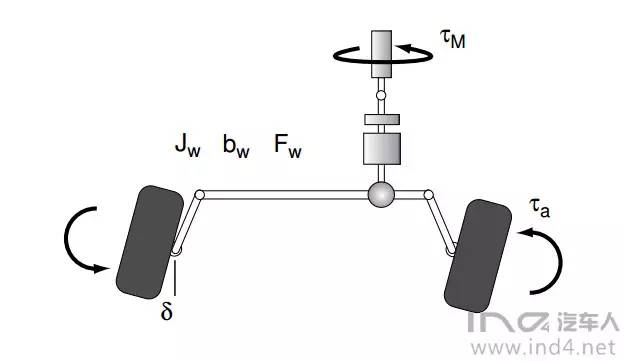
VehicleDynamic模型:主要根据车速、轮速、横摆角速度、齿条力矩、轮胎偏转角等等在车上可以测量到的关键信号,使用若干个状态观测器来获取诸如齿条力、质心侧偏角、轮胎滑移角等不能够通过直接测量得到但是控制策略又需要的关键信号。
目标位置计算:线控转向中,齿条目标转角与方向盘转角不是简单的比例对应关系,其一可以实现可变转向比的主动转向功能;另外,根据Vehicle Dynamic模型计算的动力学参数,判断车辆是否处于UnderSteer或Oversteer状态,进而调整目标转向角,起到DSR的作用。
反馈力矩计算:根据VehicleDynamic模型及转向管柱模型,控制伺服电机提供一个力反馈给驾驶员。这一部分要求在转向管柱与转向器没有真实物理连接的情况下模拟出真实的手感(中间位置感、转向力建立梯度、况信息回馈等等),无论是策略设计还是参数标定,无疑都是技术难度最大也需要花功夫的。
星空真人官网
地址:上海市松江区泗泾镇江河路635号
电话:021-57620011-802
传真:021-57629089
邮箱:h7ec@h7ec.net
 扫一扫关注星空真人官网
扫一扫关注星空真人官网


