
软件设计出了一种匀光性能优越的鳞甲反光杯。仿线 m处的配光屏幕上,最大光照强度为234 lx,HV点的光照强度大于0.80 Emax,各指标均符合国标GB 25991—2010《汽车用前照灯》的要求。将鳞甲反光杯与微透镜阵列相结合,使配光屏幕上的最大光照强度减小至59.51 lx,在各项指标仍符合国家标准的情况下,该系统的光斑能量更加均匀,且中心区域的光强进一步降低,光斑边缘过渡更加柔和,防止汽车远光灯产生眩光的效果更好,可以大量应用于汽车前照远光灯。
反光杯是用点光源灯泡作为光源,用于远距离聚光照明的、常见的反射式杯型照明系统。它具有准直性良好、光能利用率高的优点。通过改变反光杯的面型以及光源类型,可以将反光杯应用于许多不同的场景,以满足不同的需求,如汽车车灯、家用照明、科学研究等领域。
现阶段,LED反光杯已逐渐应用于汽车前照灯系统,但反光杯的杯面是传统的弧面型。传统的弧面反光杯有许多不足之处:匀光效果不够好;防眩光效果达不到国家标准;在杯体结构确定的情况下难以改变光束角等问题。将反光杯的杯面设计为鳞甲叠加,可以有效提升光照的均匀度,防止行车过程中出现眩光的问题。此外,将鳞甲反光杯和微透镜阵列相结合可以进一步提高反光杯的匀光性能,对扩展反光杯的应用场景具有积极作用。由于Zemax仿真软件可以模拟并建立光学系统模型,分析光学系统成像,且其中的宏语言编程功能提供了更为便捷、灵活的模型建立方式,可以解决许多在编辑器上无法实现的控制,因而本文将通过ZEMAX软件及其宏语言编程建立鳞甲反光杯和微透镜阵列相结合的系统模型,并对仿真结果进行分析和优化。
1.1 抛物线公式鳞甲反光杯基于抛物面构成,其横截面为一抛物线f ,f为抛物线)可得,在距离坐标原点z处,抛物面横截面的半径为
依照2012年1月1日实施的GB 25991—2010《汽车用LED前照灯》,汽车的前照灯远光应具有良好的照明效果,其配光性能应在距离前照灯中心前25 m、与中心基准线垂直的平面配光屏幕上进行测量,各测试点、区的位置如图3所示。
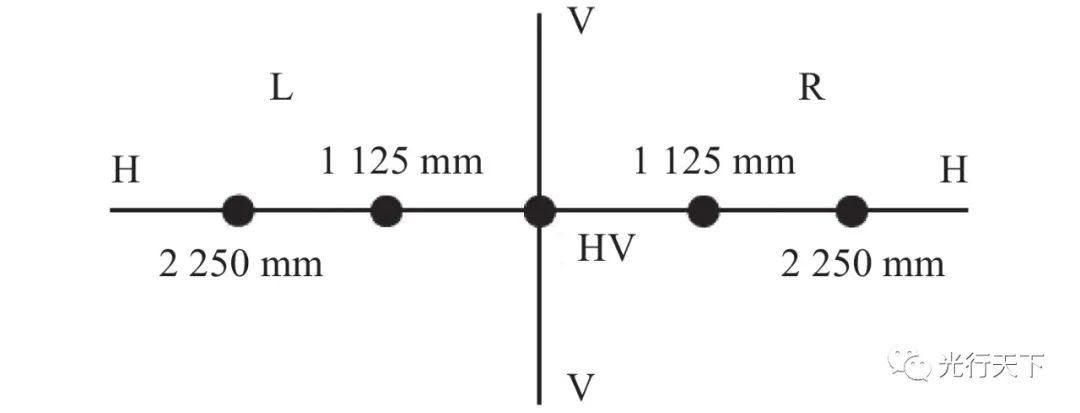
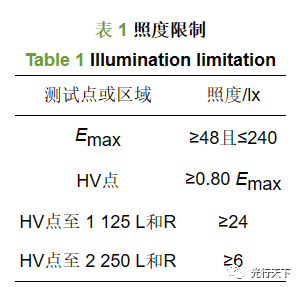
远光在配光屏幕上的照度限制如表1所示。根据国标所列配光要求,以及常见的A1型汽车反光杯的大小尺寸,可得到反光杯的设计要求,如表2所示。

Zemax软件具有ZPL宏编程扩展功能,能够更加灵活地解决用户的需求。因此,为了实现任意圈数、任意鳞甲数反光杯的建模,使用Zemax编程语言[7]进行建模。首先使用F
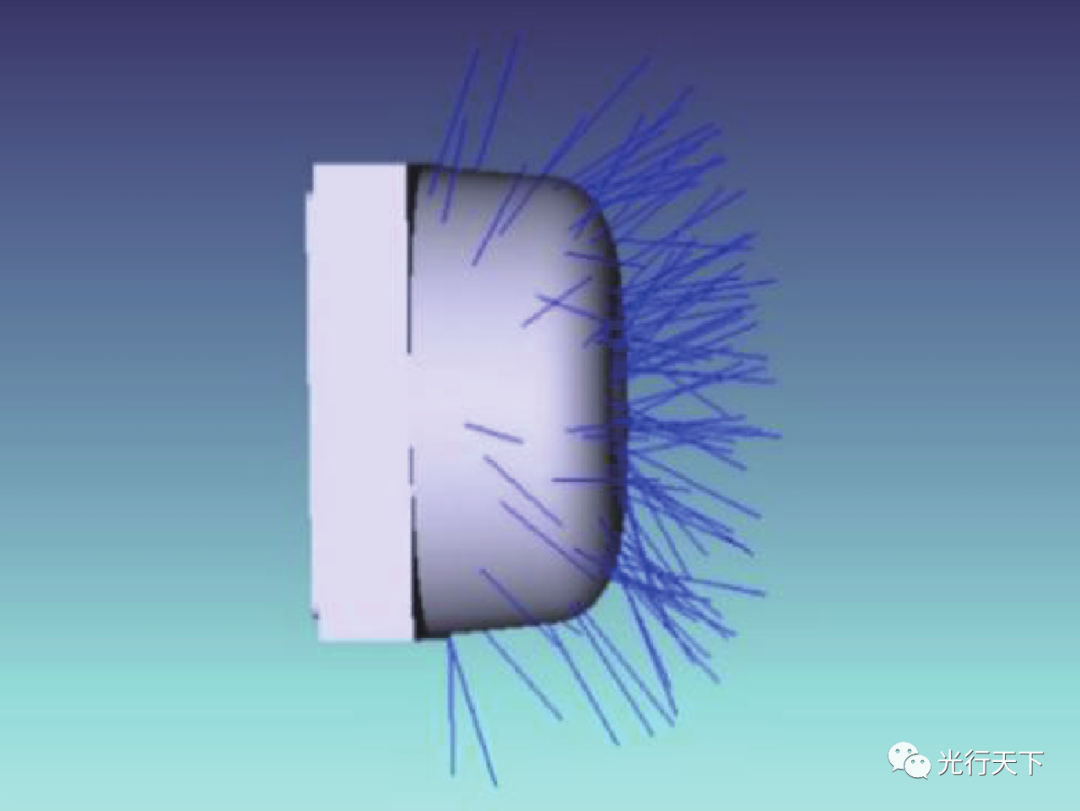
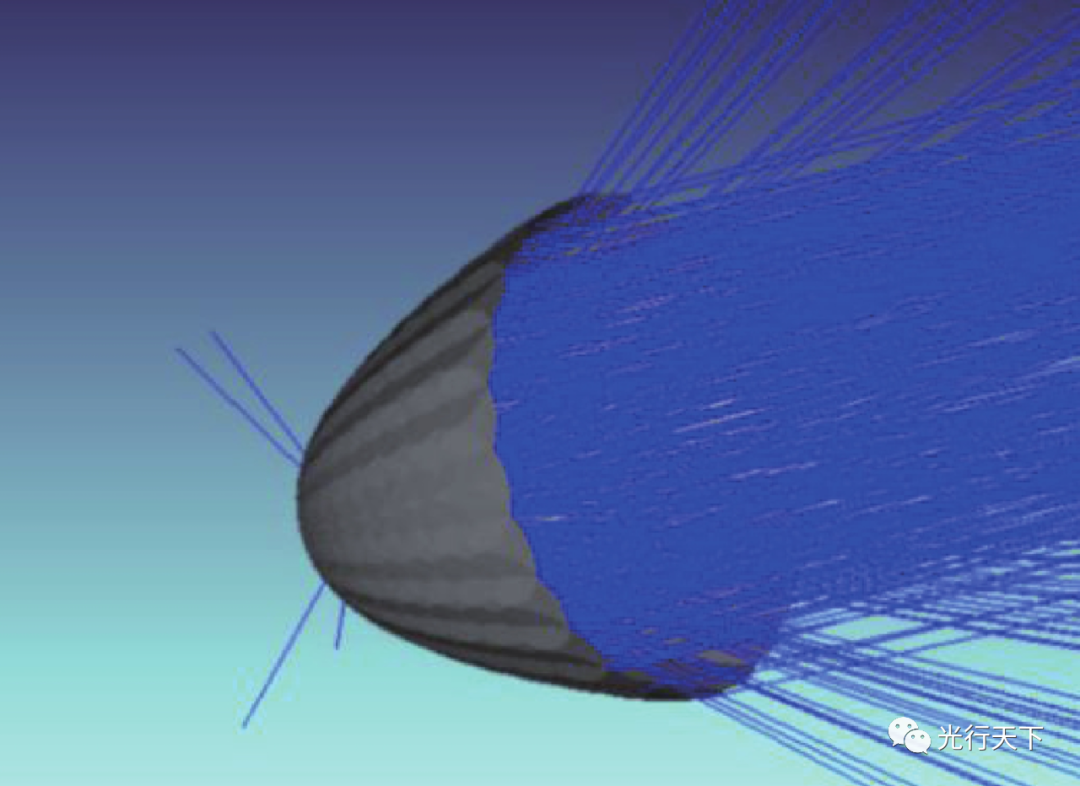
-NEXT循环语句以单个鳞甲为基本单位生成一圈鳞甲,再次使用FOR-NEXT循环语句进行嵌套,径向将一圈鳞甲扩展为完整的鳞甲反光杯。这样,若需要改变鳞甲反光杯的抛物线方程或者鳞甲数,则只需修改代码中p(抛物线的焦准距)、n(每圈的鳞甲数)、q(鳞甲圈数)参数的值即可。根据汽车反光杯的尺寸要求,确定杯口半径为50 mm,深度为75 mm。将y= 50 mm,z= 75 mm代入抛物线方程,得到焦准距p= 16.667 mm,满足条件的鳞甲的圈数为10圈。由式(11)计算可得,每圈的鳞甲数设定为24。这样就确定了程序中所需的所有参数值。将编写好的程序放入Zemax软件根目录下的Mac
文件夹,通过Zemax软件的宏即可运行程序,得到设计好的鳞甲反光杯模型。2.3 光源选择为更加契合实际,仿真所需要的LED光源组件的信息直接从汽车灯珠供应商的官网下载。选用了一款OSRAM产品GH_CSBRM4_24,OSLON SQUARE–Hyperred,其尺寸大小为3 mm×3 mm×1.86 mm。将下载好的文件放入相应的根目录,即可在Zemax软件中加载,得到灯珠的模型,如图4所示。将其光通量设置为3 000 lm,键入 Zemax 非序列元件编辑器中。
式中:x为反光杯最大开口处横坐标;p为反光杯焦距。 代入数据,得到光源几何尺寸引起的出射光误差偏角θ= 0.00109°,该误差偏角远小于预定的出光角度,可近似认为出射光仍为平行出射。
本文通过ZEMAX宏编程设计了一款应用于汽车前照灯的鳞甲反光杯系统,采用灯珠制造商提供的LED光源组件,提高了出射光线光强分布的均匀性;在杯口设置了一组微透镜阵列,在符合国家相关标准的前提下,使配光屏幕上的光强分布均匀程度进一步得到提高,光斑边缘过渡更加柔和,提高了防眩光能力,有利于安全行车;将微透镜阵列子透镜半径对光强分布的影响进行了仿真,得到了最佳的半径配比。本文设计的鳞甲反光杯系统所用材料较少,在实际生产生活中有广阔的应用前景。

包括远光灯、近光灯、转向灯、日间行车灯和雾灯。除了日间行车灯,这些功能大多数传统上使用白炽灯、氙灯或高压气体放电(HID)灯。在前大灯中用LED替换灯的最简单的方法是利用单独的
车身造型师设计出令人赞叹的前大灯和尾灯轮廓和外形,激发消费者的购买政府监管机构关注光束的形状和亮度
大灯远3倍至5倍的距离,甚至可以达到10倍以上的距离,可以提前4-5秒发现道路上的车辆、行人、障碍物、前方路况一目了然,大大提高
转向时方向盘的旋转角度,为非接触式多圈绝对角度测量。传感器开发过程符合功能安全规范标准ISO26262。产品介绍• 应用 ♦ 自适应前
电动侧视镜的概念验证解决方案,在这套解决方案中,电动侧视镜可以无线方式与控制开关通信。本参考设计弃用了厚重而昂贵的电缆束,转而采用 TI 的
、自动变速箱等。测试项目:电气性能测试EMC测试环境老化试验材料、环境及化学试验其他性能测试`
等等。7、低压电流可点亮LED车灯只需要低压直流电即可点亮,而且它的负载小,抗干扰强,对于环境要求也比较低,不需要像
串长度:14 个 LED通过了 CISPR 25 测试支持动态输入电压支持动态负载(矩阵/调光)
设计人员必须准备应对两种可能由搭线着车时所犯错误而导致的情况:电池反接,双电池情况。当把跨接电缆的红色一端接至电池接地,而把黑色一端接到电池正极时会出现电池
可调Ø 峰值电流采样电压:250mVØ 内置电流采样前沿消隐电路Ø 内置 60V 功率管Ø带过温保护4.产品应用: Ø 平板显示器LED 背光
可调Ø 峰值电流采样电压:250mVØ 内置电流采样前沿消隐电路Ø 内置 60V 功率管Ø带过温保护4.产品应用: Ø 平板显示器LED 背光
的新发展,包括Pixel Light技术,正在帮助缓解这一问题。Pixel Light不是依赖传统的电机控制光束调节,而是控制多个
MCP1407 IC用于驱动反激MOSFET .IR2453 IC用于驱动四个全桥MOSFET
HID镇流器。设计中有五个驱动信号,一个是反激MOSFET驱动信号,另外四个是全桥逆变器MOSFET。 MCP1407 IC用于驱动反激MOSFET .IR2453 IC用于驱动四个全桥MOSFET
EMCclass5等级测试。该方案可以用在多个需要升降压的电路负载中,输入输出范围宽,非常具有实用意义;*附件:
组的组件会具有迥然相异的驱动器要求,包括电压和电流要求、拓扑、功率级别或独特的调光功能。满足各种
自发明以来在用途上基本保持未变。随着自适应远光灯(ADB)技术的出现,这一趋势已开始发生变化。
自发明以来在用途上基本保持未变。随着自适应远光灯(ADB)技术的出现,这一趋势已开始发生变化。在
的装配、测试和设计。50W升压型LED驱动器LED串可以由任何能够在LED串两端产生正确的电压、并对流过LED串的电流进行调节的DC/DC转换器来驱动。在大多数场合中,最棘手的问题是
能够探测到对面车道驶来的车辆并及时关闭部分远光灯(如图2所示),或者能够根据对面车道上车辆的位置改变灯光照射的角度,是不是从某种意义上提高了道路安全呢
端保护 TI 设计,以 TI 的零 IQ 智能二极管和高端保护为特色。该设计利用两个 LM74610-Q1 IC 来驱动 OR-ing 配置中
控制,无电流节点跳变g:输出短路保护 过温保护h:二功能模式:全亮/半亮/三功能循环I:SOT23-6 封装应用领域:LED电动
材料,如镜子,只有在表面角度垂直于 VL53L0X 时才会亮。在这种情况下,仅凭亮度的差异是很难区分的。 有没有办法用 VL53L0X 区分
灯光源规格尺寸: 2.0*1.6*0.75mm功 率: 3W显 指: 无电 流: 700ma电 压: 3.0-3.5v
的研究:如何给智能辅助驾驶车辆提供准确的外界环境信息,使其决策控制建立在实时准确的道路环境信息之上是智能辅助驾驶车辆研究的关
的高亮度 LED 矩阵管理器 Number of channels (#) 6 Topology Floating Switch Rating
的 12 通道高亮度 LED 矩阵管理器 Number of channels (#) 12 Topology Floating Switch
的 6 通道高亮度 LED 矩阵管理器 Number of channels (#) 6 Topology Floating Switch Rating
的 12 通道高亮度 LED 矩阵管理器 Number of channels (#) 12 Topology Floating Switch
的高亮度 LED 矩阵管理器 Number of channels (#) 12 Topology Floating Switch Rating
照灯采用LED灯的应用。空气冷却和被动液冷方式经尝试后由于不达标被排除,故主动液冷方式被采用。此文中对几种主动液冷
LED自身的PN结产生的结温升高,使LED的光衰加剧、发光效率受到影响,寿命变短。应用LED作为
照灯驱动器电路图,其效率高达 98.5%。 采用 24V 电池的飞机和大型载重卡车需要强力、高效和坚固的前照灯和
大灯灯泡具有寿命长、亮度高、投射距离远等显著优点,己经成为大面积替代卤素灯和氙气灯的优选光。
星空真人官网
地址:上海市松江区泗泾镇江河路635号
电话:021-57620011-802
传真:021-57629089
邮箱:h7ec@h7ec.net
 扫一扫关注星空真人官网
扫一扫关注星空真人官网


